
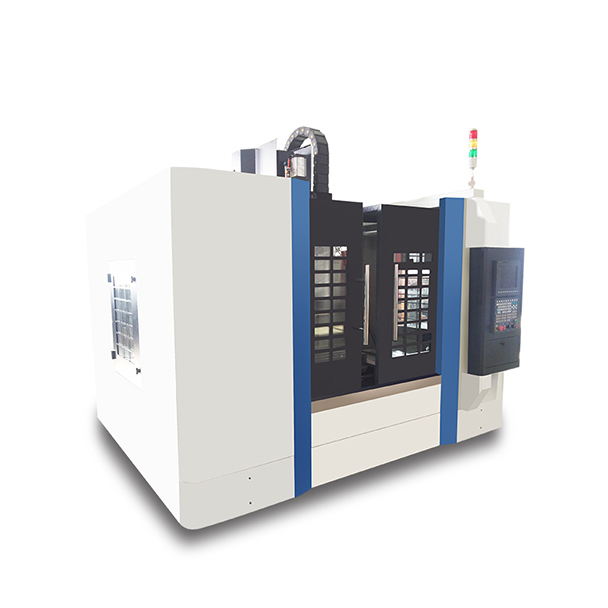


vmc1060 tehase metallist 3-teljeline vertikaalne cnc freespinkide keskus
Eelis
1. Valikuline CNC pöördlaud võib moodustada nelja- ja viieteljelise koordinaatühenduse töötlemise.
2. Valikuline automaatne laastueemaldusseade koos voodistruktuuriga sisemise puhtuse tagamiseks;valikuline spindliõli jahutus jne.
3. Valand läbib kaks vanandamistöötlust, et kõrvaldada materjalis jääkpinge.
4. X-, Y-, Z-suunalised juhikud saavad valida Taiwani raskeveokite lineaarsed pallijuhikud, millel on kiire kiirus, kõrge jäikus jne.

Spetsifikatsioon
| Üksus | VMC1060 | ||||
| Töölaua suurus (pikkus × laius) mm | 1300 × 600 | ||||
| T-pilu (mm) | 5-18×100 | ||||
| Maksimaalne töölaua kaal (KG) | 650 | ||||
| X-telje käik (mm) | 1000 | ||||
| Y-telje käik (mm) | 600 | ||||
| Z-telje käik (mm) | 600 | ||||
| Spindli nina ja laua vaheline kaugus (mm) | 100-700 | ||||
| Spindli keskpunkti ja samba vaheline kaugus (mm) | 667 | ||||
| Spindli koonus | BT40/50 | ||||
| Maxspindli kiirus (rpm) | 8000/10000/12000 | ||||
| Spindli mootori võimsus (Kw) | 11/15 | ||||
| Kiire söötmiskiirus: X-, Y-, Z-telg (m/min) | 16/16/16 (24/24//24 liinilaevad) | ||||
| Kiire lõikekiirus (m/min) | 10 | ||||
| Positsiooni täpsus (mm) | ±0,005 | ||||
| Korduv asukoha täpsus (mm) | ±0,003 | ||||
| Automaatne tööriistavahetaja tüüp | 16 tööriistapea tüüpi tööriistavahetaja (valikuline 24 käe tüüpi automaatne tööriistavahetaja) | ||||
| Maxtööriista pikkus (mm) | 300 | ||||
| MaxTööriista läbimõõt | Φ80 (külgnev tööriist) / φ150 (mitte külgnev tööriist) | ||||
| Maksimaalne tööriista kaal (KG) | 8 | ||||
| Tööriista vahetamise aeg (tööriistalt tööriistani) s | 7 | ||||
| Õhurõhk (Mpa) | 0.6 | ||||
| Masina kaal (KG) | 7500 | ||||
| Üldmõõt (mm) | 3340*2800*2700 | ||||
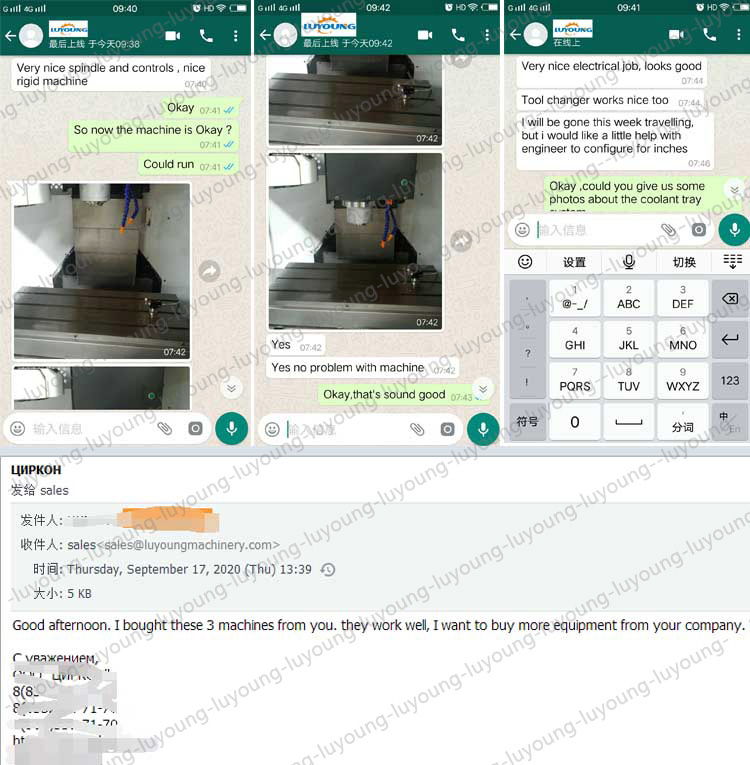
Miks valida meid
Saame klientidelt palju head tagasisidet, näiteks:
Väga kena spindel ja juhtnupud, kena jäik masin.Väga korralik elektritöö, näeb hea välja.
Tööriistavahetaja töötab ka ilusti.
Ostsin teilt 3 masinat.Töötavad hästi, soovin teie ettevõttest seadmeid juurde osta.
Masina testimine
1. Lineaarse liikumise positsioneerimise täpsuse tuvastamine peaks toimuma koormuseta tingimustes ja ülimuslik on lasermõõtmine.
2. Lineaarse liikumise korduva positsioneerimise täpsuse tuvastamine, tuvastamiseks kasutatav instrument on sama, mis positsioneerimise täpsuse tuvastamiseks.
3. Lineaarse liikumise lähtepunkti tagasilöögi täpsuse tuvastamine.
4. Lineaarse liikumise pöördvea tuvastamist mõõdetakse mitu korda (tavaliselt 7 korda) kolmes positsioonis käigu keskpunkti lähedal ja mõlemas otsas ning arvutatakse iga positsiooni keskmine väärtus ja saadud keskmise väärtuse maksimaalne väärtus on pöördväärtus Error.






